軌道設備と道床に関する最新状態の記録は、以下分野の意思決定者にとって不可欠です。
- 軌道工事
- 信号通信
- 軌道戦略と計画
- 鉄道オペレーション
- 軌道設計
軌道状態データマッピングには、通常次のものが含まれます。
- 要求精度に応じた軌道・周囲設備マップ
- CAD・ArcGIS・MicroStation・KML・CSV形式との互換性を持たせたアウトプット
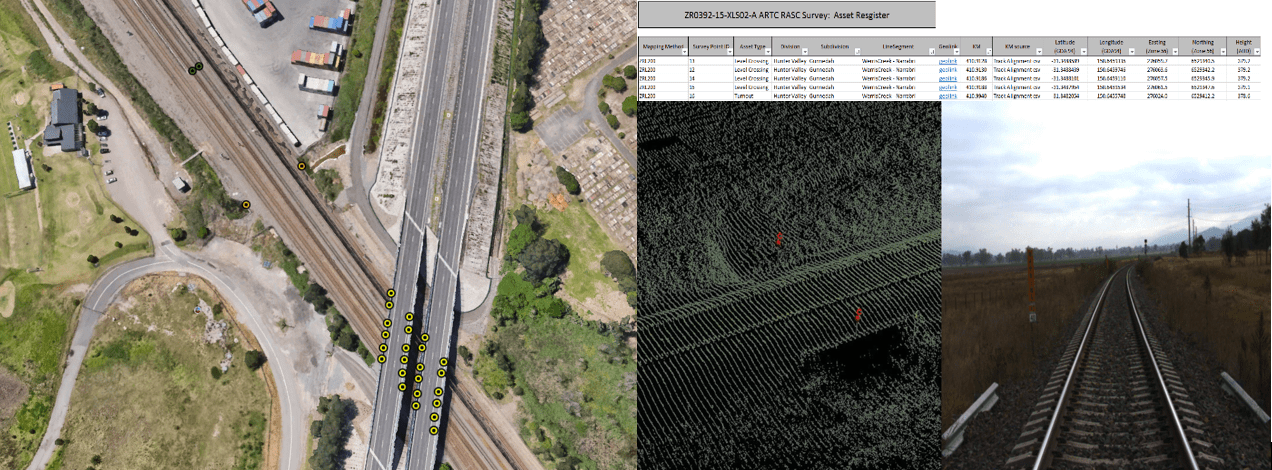
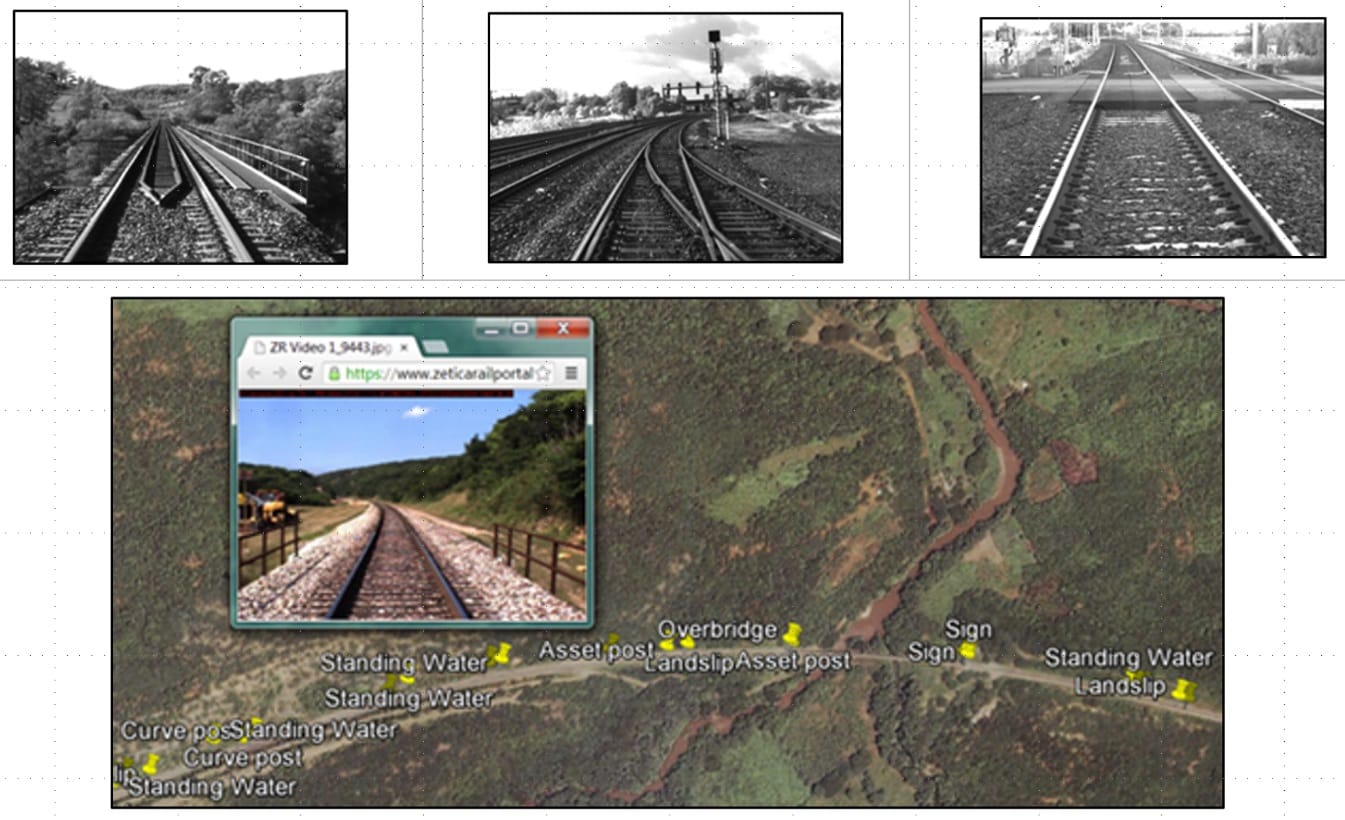
- 調査対象エリアの写真測量
- 位置特定・追加情報取得のためのジオリファレンス点群データ
- グラウンドコントロールを活用した位置精度の検証
- 位置精度の推測
Zetica地上・地下軌道統合マッピングシステムの主要装置は次のとおりです。
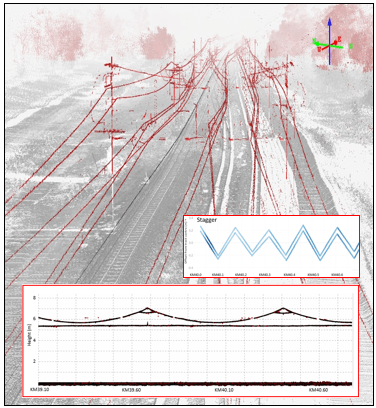
- ZRL200 – 360°200 Hzレーザーを主体に構成されたモバイル地上レーザースキャニング(MTLS)システム。正確な軌道設備のマッピング・軌道中心の抽出・バラスト量・軌道排水と構造物のクリアランス測定を行います。
- ZR-ASC–マルチカメラエリアスキャンシステム。点群データから軌道設備を特定するメタデータを提供し、Zetica RASC ビューアーを利用したデスクトップ検査に使用されます。
- INS – 慣性ナビゲーションシステム。上記マッピングシステムの正確なジオリファレンスと大まかな軌道エリアを示すマッピングに使用されます。
- ZRC-LS2.4 – マルチラインスキャンカメラシステム。分岐器・噴泥箇所・枕木間隔/向きなど軌道基盤部材を正確にマッピングするために使用されます。
- ZARR – GPRシステム。交差点・橋梁・排水溝・分岐器等軌道構造物のマッピングおよび路盤形成層やバラスト汚損等軌道地盤状態を証明するために使用され、保線計画の策定をサポートします。
- 位置測定を円滑に進めるため、すべてのシステムは距離測定器(DMI)およびデュアル周波数dGPSシステムと接続されています。