Un registre spatial à jour des actifs le long des voies et des plateformes est primordial pour la prise de décision par les parties prenantes suivantes :
Génie civil et Structures
Signalisation et Communications
Stratégie et Planification de mobilier
Opérations
Voie et Conception
Un exercice de cartographie des données des actifs comprend typiquement :
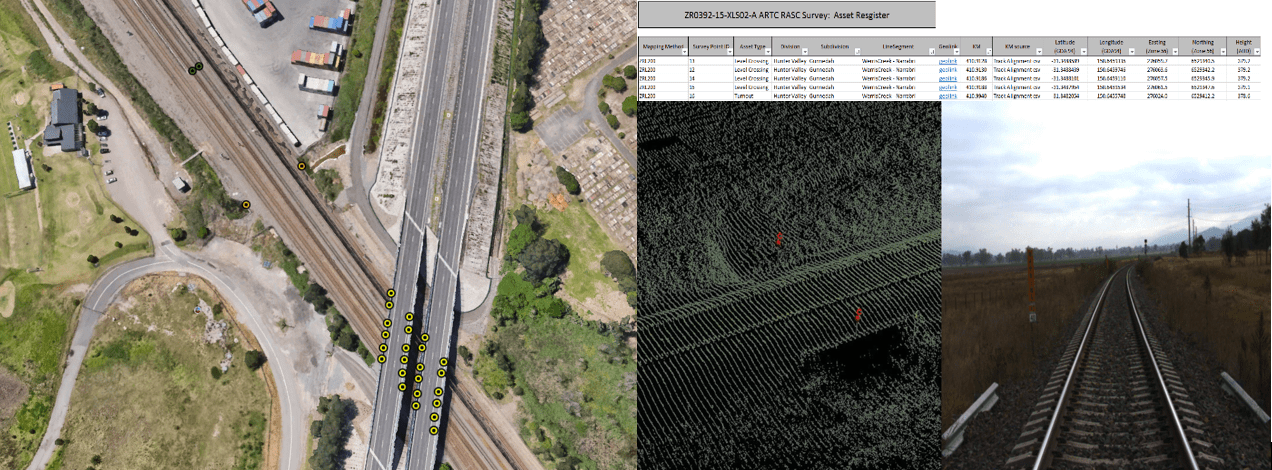
Une carte du couloir ferroviaire et des actifs aux précisions requises
Des données compatibles avec les formats DAO, ArcGIS, MicroStation, KML et CSV
Une photogrammétrie pour les secteurs examinés
Des nuages de points géoréférencés pour vérifier la localisation et pour capturer des informations additionnelles
La validation de l’exactitude de la localisation en employant des points de contrôle terrain
Une évaluation des exactitudes de localisation
Les composants principaux du système RASC ® de Zetica pour cartographier les actifs hors-sol et souterrains incluent :
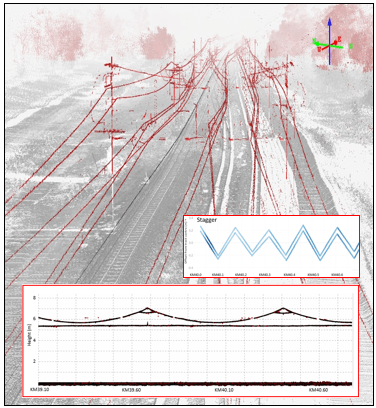
ZRL200 – un système de balayage à laser terrestre mobile (MTLS) établi autour d’un laser de 200 hertz à 360o pour cartographier précisément les actifs des voies et pour l’extraction des mesures de la ligne centrale des voies et en complément du volume de ballast, du drainage des voies et des dégagements des structures
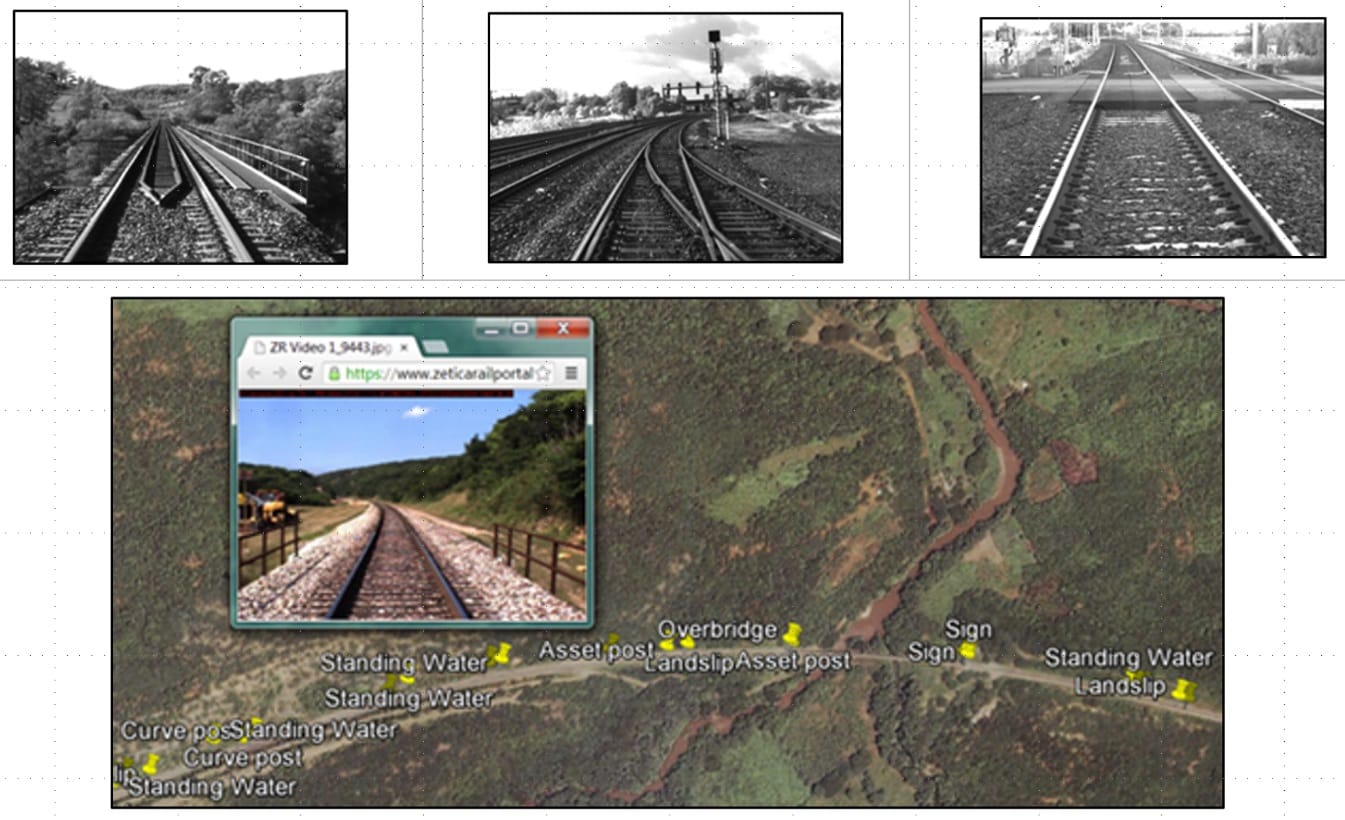
ZR-ASC – un système de balayage de secteur multi-caméra pour fournir des méta-données afin d’identifier les actifs avec les nuages de points ainsi que pour l’inspection par ordinateur de bureau en utilisant la visionneuse RASC de Zetica
INS – un système de navigation à inertie pour le géoréférencement précis de tous les systèmes de cartographie mentionnés ci-dessus ainsi que pour la cartographie qualitative des sections rugueuses de voie
ZRC-LS2.4 – un système de caméra à balayage linéaire multiple pour cartographier exactement les composants de la plateforme tels que les voies déviées, les taches de boue en surface ainsi que l’espacement et l’orientation des traverses
ZARR – un système de RPS pour la redondance en cartographiant les composants de voie tels que les croisements, les ponts, les ponceaux et les voies déviées et pour l’identification de l’état des plateformes tel que celui des couches d’assise et de l’encrassement du ballast pour faciliter la planification de la maintenance
Tous les systèmes sont interfacés avec un instrument de mesure de distance (DMI) et un système GPS différentiel (dGPS) afin de faciliter la localisation.